- El juego como un motor de enseñanza
La UNLP generó dos desarrollos para conocer sobre personalidades de la ciencia a través del uso tecnologías de realidad virtual y aumentada.
Un equipo de investigadores de la Facultad de Informática de la Universidad Nacional de La Plata desarrolló dos juegos educativos, uno basado en realidad aumentada, y el otro en realidad virtual. Se trata de juegos serios, es decir que no están pensados sólo para generar diversión, sino que proponen objetivos educativos. Tienen un propósito explícito, que va más allá del entretenimiento. En este tipo de propuestas se analizan los efectos que producen sobre la motivación de los estudiantes, el aprendizaje y el rendimiento académico.
Más informaciòn en https://unlp.edu.ar/investiga/cienciaenaccion/cuando-los-jueguitos-electronicos-son-un-motor-del-aprendizaje-43461/
https://photos.app.goo.gl/GaqJ5FUCx6FVt5Az7
Seguir leyendo → - Inteligencia Artificial y Covid-19: ¿Serán las máquinas las que nos salven?
La pandemia genera diariamente millones de gigabytes de datos -el equivalente a una modesta biblioteca-, tanto de registros médicos como de información de pacientes infectados. Resultados de análisis de sangre. Edad, raza. Pruebas genéticas. Tratamientos aplicados. Evolución del paciente. Desenlace. Ahora, 10 meses después del primer brote y con ayuda de inteligencia artificial, los científicos están empezando a poner orden y establecer conexiones en esa maraña de cifras y palabras, y eso también los conduce a nuevas teorías sobre el virus y cómo frenarlo
Fuente : https://bit.ly/38xlf7j La Nacion.
Seguir leyendo →
- Gracias a la tecnología, Investigadores de la Facultad logran recrear la fascinante travesía de Charles Darwin
A casi 200 años de una de las travesías científicas más fascinantes de la historia, un grupo de investigadores de la Facultad de Informática de la Universidad Nacional de La Plata logró recrear, gracias a la tecnología, el mítico viaje de Charles Darwin a bordo del Beagle.
Científicos del Instituto de Investigación en Informática (LIDI) de la Facultad de Informática, diseñaron un juego de realidad aumentada que hace posible ser parte de esta aventura y ponerse en la piel de gran explorador que, en un viaje de 5 años recorrió el mundo desde las costas de Inglaterra hasta el Estrecho de Magallanes. El proyecto se gestó a partir de un acuerdo de cooperación con la subsecretaría de Gestión y Difusión del Conocimiento, ministerio de Ciencia, Tecnología e Innovación de la provincia de Buenos Aires.
La investigadora Cecilia Sanz, directora del proyecto, expresó: «el objetivo del juego ‘Ruta Darwin’ es ofrecer una alternativa para conocer información de la travesía de este científico a través de una dinámica diferente, que combina tecnología analógica y digital. Se diseñó, por un lado, una aplicación móvil con realidad aumentada en formato de juego, y por otro lado, se realizó una simulación del barco, el Beagle, usando realidad virtual, esta simulación fue coordinada por el magister Pablo Thomas«.
«La aplicación de RA, Ruta Darwin, permite aumentar un mapa que muestra el recorrido de Charles Darwin a bordo del Beagle, en su travesía de casi 5 años. Este mapa con la aplicación de RA forman parte de una muestra itinerante referida al científico y naturalista. La aplicación propone un juego exploratorio cuyo objetivo es completar un álbum de medallas a partir del recorrido por diferentes puertos en los que estuvo Darwin en su viaje. En cada puerto, se aumenta información que presenta un relato en primera persona de Darwin sobre sus vivencias y observaciones en la zona y una trivia, que al responderla correctamente, permite ganar una medalla», agregó Sanz.
Cabe destacar que este desarrollo se incorpora a la muestra itinerante que la subsecretaría de Gestión y Difusión del Conocimiento de la provincia de Buenos Aires venía realizando, la que contaba con diferentes paneles de información y juegos, en relación al trabajo y al viaje de Darwin. Sin embargo, hasta el momento no se utilizaba tecnología digital, sino que se trataba de una muestra tradicional.
«Para la creación de esta aplicación se trabajó durante un semestre en conjunto con el equipo de la subsecretaría, para analizar las posibilidades de aumentar el mapa impreso. De esta manera, se elaboró un guión que rescata de los libros de Darwin aspectos destacados de sus experiencias y observaciones durante la travesía. Se puso foco en el descubrimiento de especies y fósiles (contenido vinculado al área de Ciencias Naturales) y en su relación con reconocidos personajes de la época (contenido vinculado a Ciencias Sociales)», explicó la investigadora.
Seguir leyendo →
- La computadora de navegación del Apolo estrenó muchas de las tecnologías que usamos hoy
La palabra «computadora» hoy suena cotidiana. Pero hace medio siglo, la propuesta parecía el resultado de un delirio febril. Las computadoras ocupaban habitaciones enteras. Consumían tanta electricidad como un barrio. ¿Cómo iban a instalar algo así en una cápsula en la que los tres astronautas casi no tenían espacio para moverse?
Sin embargo, una invención reciente, el circuito integrado, traería la solución. Había nacido de las mentes de Jack Killby (de Texas Instruments) y Robert Noyce (de Fairchild Semiconductor) entre 1959 y 1960, y hoy nos parece una obviedad: colocar varios transistores en la misma pieza de material semiconductor. Nacían así los chips y, con ellos, la miniaturización. Al principio fueron un puñado de transistores en cada circuito integrado. Hoy, un chip puede contener varios miles de millones. Pues bien, una de las primeras computadoras que usaron circuitos integrados fueron las del programa Apolo.
Y todavía un tercer sismo técnico-cultural se estaba gestando en la Universidad de California en Los Ángeles. En octubre, se conectarían los dos primeros nodos de Arpanet, la predecesora de Internet. En 1969, no hay duda, se alinearon los planetas.
Leer la nota entera aquí
Seguir leyendo → - HUELLAS PATRIMONIALES
El Proyecto de Extensión “Huellas Patrimoniales” es un trabajo conjunto entre la Facultad de Informática y la Facultad de Ciencias Económicas de la Universidad Nacional de La Palta que tiene como objetivo la inclusión educativa e identitaria de niños y jóvenes en situación de exclusión social.
En este sentido, docentes, graduados y alumnos las dos unidades académicas estrenaron una aplicación móvil de realidad virtual llamada “HuVI” durante un taller realizado en la Asociación Civil El Roble. La misma consiste en un videojuego gratuito que trata de obtener huellas virtuales a partir de experiencias de viajes por algunos de los sitios patrimoniales más emblemáticos de la Argentina.
Durante el taller se buscó reflexionar sobre las características patrimoniales del Parque Nacional Iguazú, y que niños de entre 6 a 12 años disfruten de la experiencia de jugar a través de la aplicación móvil con realidad virtual. Además, se incluyó un relevamiento sobre el disfrute, usabilidad y jugabilidad que experimentaron los usuarios de modo de ir perfeccionando el diseño.
Su desarrollo estuvo a cargo de la Lic. Yesica Chirinos y dirigida por la Dra. Cecilia Sanz, de la Facultad de Informática en el marco de la Maestría en Tecnología Informática Aplicada en Educación y, además, fue ilustrada por la Lic. Ayelén García, dibujante egresada de la Facultad de Bellas Artes de la UNLP.
Actualmente la aplicación está disponible para dispositivos con sistema operativo Android, sin embargo la Facultad de Informática y la de Cs. Económicas se encuentran en proceso de registro de la propiedad intelectual de la misma para luego entrar en un etapa en la que pueda ser usada y descargada libremente.

Seguir leyendo →
- Bioimpresoras 3D para tratar heridas en pacientes diabéticos
Un equipo de investigadores de la Universidad Nacional de La Plata logró diseñar la primera bioimpresora 3D a nivel nacional para desarrollar sistemas de liberación controlada de moléculas terapéuticas que puedan ser empleadas para el tratamiento de patologías en piel. Es un avance revolucionario que abre la puerta a nuevas y más efectivas formas de tratar las lesiones de los pacientes diabéticos.
Se trata de un trabajo del Laboratorio de Nanobiomateriales del Centro de Investigación y Desarrollo en Fermentaciones Industriales (CINDEFI- UNLP CONICET) junto al Laboratorio de Investigación y Formación en Informática Avanzada (LIFIA) de la Facultad de Informática de la UNLP.
La diabetes es una patología atribuida a la elevada concentración de los niveles de azúcar en sangre, producida por desregulación en la producción de insulina. Una de las mayores complicaciones que sufren los pacientes con esta enfermedad es el denominado «pie diabético», patología causada por una escasa vascularización en los miembros inferiores, lo que disminuye el proceso de cicatrización en lastimaduras y genera la aparición de úlceras. Se considera que el riesgo de desarrollar úlceras de pie diabético en personas adultas es del 34% y que más del 50% de las mismas se infectan con microorganismos.
En general, las úlceras en pie diabético que no son controladas y tratadas apropiadamente conducen a la amputación del miembro ulcerado y, estadísticamente, se conoce que la sobrevida luego de la primera amputación es de aproximadamente de 5 años. Estos hechos poseen un elevado impacto social negativo, además de un alto costo sanitario.
Guillermo Castro, responsable del Laboratorio de Nanobiomateriales explicó que «el desarrollo de bioempresoras 3D para la realización de apósitos con fines terapéuticos para pie de diabético tiene varias ventajas. Una de ellas es que los apósitos pueden ser personalizados para cada caso, debido a las características físicas tridimensionales de las úlceras como por su extensión y profundidad, así como la cantidad y el tipo de fármacos y otras moléculas terapéuticas a emplear de acuerdo con las características y necesidades del paciente».
Por otro lado, el investigador agregó: «la ventaja de las matrices bioimpresas que contienen moléculas terapéuticas es que permiten la liberación prolongada de fármacos en concentraciones adecuadas durante un periodo de tiempo establecido. De esta manera, se reduce la concentración de fármacos debido a la acción local, aumenta su efectividad y evita los riesgos de toxicidad secundaria en otros órganos –tal como suele ocurrir con los tratamientos convencionales-«.
Las heridas producidas en la piel de los pacientes diabéticos pueden transformarse en la puerta de ingreso para diversos microorganismos. Por ello, cuando no son tratadas oportunamente, aumentan los riesgos de contraer infecciones e incluso septicemias, que pueden conducir a la muerte. Tal es el caso de personas con extensas quemaduras y/o que presentan problemas vasculares y/o de supresión inmune.
Castro detalló que: «la principal diferencia entre las bioimpresoras 3D y las impresoras 3D tradicionales disponibles en el mercado, es el uso de biopolímeros o polímeros sintéticos biocompatibles con tejidos para la producción de apósitos sin la necesidad del empleo de elevadas temperaturas».
Respecto al funcionamiento, el investigador destacó la «facilidad y sencillez de manejo de las bioimpresoras 3D que posibilitan, mediante un simple entrenamiento previo de personal médico, poder ser empleadas en unidades sanitarias de baja y media complejidad. Además –agregó- se debe mencionar la reducción de los costos sanitarios debido a que los apósitos que se utilizan actualmente para tratamiento de patologías de piel son importados, y, por lo tanto, muy costosos».
En la comparación con los apósitos convencionales, los generados con la tecnología de bioimpresión tienen otra enorme ventaja, ya que no son de uso genérico, sino que pueden ser adaptados a las patologías de cada paciente.
El responsable del Laboratorio de Nanobiomateriales informó que «actualmente, la impresora que está en uso es un prototipo, con el cual estamos ajustando y ensayando los parámetros de las diversas matrices a emplear. El proyecto tiene apenas un año y nos encontramos estudiando las diferentes matrices, para caracterizarlas fisicoquímicamente y hacer los estudios con diversos fármacos».
El proyecto es desarrollado en forma conjunta con la doctora Vera Alvarez, responsable del Grupo de Materiales Compuestos Termoplásticos (CoMP) del Instituto de Investigaciones en Ciencia y Tecnología de Materiales (INTEMA, CONICET – UNMdP).
Una enfermedad que crece peligrosamente en Argentina y el mundo
La diabetes es una enfermedad que tiene una elevada incidencia en la población mundial y se encuentra en crecimiento constante. Según la Organización Mundial de la Salud, en 1980 afectaba a 108 millones de personas, y se estima que ahora esa cifra trepó a más de 425 millones.
Estadísticamente la diabetes afecta en el mundo a 1 de cada 11 personas adultas. A su vez, dos tercios de la población diabética adulta (283 millones) vive en países con medio y bajo nivel socio-económico. En Argentina se ha estimado que el 5,5% de la población, que equivale aproximadamente de 2,4 millones de personas, es diabética.
Seguir leyendo →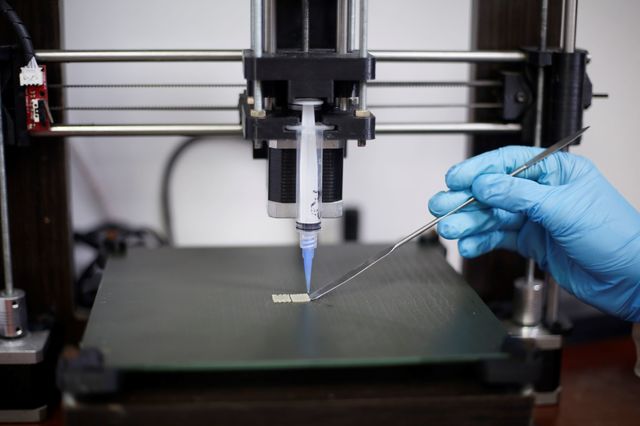
- Investigadores de la UNLP desarrollan un tablero inteligente para reducir el consumo eléctrico en las aulas
Con un tablero inteligente que monitorea y controla el encendido y apagado de diferentes dispositivos, investigadores de la Facultad de Informática de la Universidad Nacional de La Plata buscan reducir el consumo energético evitando el gasto innecesario de electricidad en las aulas de la casa de estudios platense.
El desarrollo de este equipamiento programable, además de utilizarse en diferentes espacios de la Universidad como aulas y laboratorios, podría implementarse también en ámbitos de importancia para el desarrollo del país, como son las industrias vinculas al sector tecnológico.
Laura De Giusti, directora del proyecto, explicó que se realizó un prototipo de tablero inteligente, que incluye el hardware y un software para medir y controlar el encendido y apagado de los dispositivos electrónicos de un aula experimental.
La Unidad Inteligente (UI) posee una placa procesadora para permitir su programación y adaptación a diferentes ambientes, permitiendo seleccionar criterios de decisión, como horarios y sensores en Tiempo Real que detectan la presencia de personas en el aula.
El diseño del prototipo consta de un sistema que combina electrónica: sensores, timers e interruptores de energía, con un software que incluye criterios de toma de decisión para reducir consumo. El desarrollo es una unidad simple que puede agregarse en cualquier espacio.
La iniciativa, desarrollada en el Instituto de Investigación de Informática III- LIDI, surge del incremento continuo de uso e incorporación de artefactos eléctricos a la vida cotidiana causando un excesivo consumo energético (CE) que muchas veces se asocia al mal uso de los mismos. La idea del LIDI busca optimizar en forma automática el consumo de energía de dispositivos de uso cotidiano.
De Giusti explicó que «los criterios de decisión de apagado/encendido/ apagado/retardado y análisis de los datos para ver su impacto en el consumo constituyen el núcleo del software que se encuentra inmerso en el tablero».
El proyecto parte de la incidencia que tiene el costo de la energía en ámbitos universitarios y en particular en unidades académicas como la Facultad de Informática, que cuenta con más de 400 procesadores activos en momentos pico de actividad, además de unos 1800 alumnos cursando las asignaturas.
Este problema es similar en otras áreas de la UNLP. En algunos ámbitos, el consumo se incrementa por las características de la actividad que se desarrolla en las Unidades de Investigación y Desarrollo de las Facultades.
Por otra parte, todas las empresas electro intensivas, en particular las de la industria informática, señalaron problemas similares. En el caso particular del Polo IT La Plata, que reúne un conjunto de más de 60 empresas del sector Software y Servicios Informáticos, mostró su interés en el proyecto. El desarrollo de la UNLP tiene un mercado potencial y su costo se amortizará con el ahorro energético. Es importante señalar que las mismas empresas interesadas en el proyecto son potenciales fabricantes de tablero inteligente.
Seguir leyendo →

- La mano biónica italiana que puede “imitar” la sensación del tacto
Su código de programación permite transmitir a los nervios del brazo amputado toda la variedad de percepciones que habrían recibido los receptores nerviosos en base al tacto.
Seguir leyendo →
- La evolución de los traductores automáticos gracias a las redes neuronales
Durante la Copa del Mundo en Rusia se detectó un incremento en el uso del traductor de Google.
Cómo ha evolucionado esta herramienta, cuáles son los desafíos y qué otros servicios similares existen.
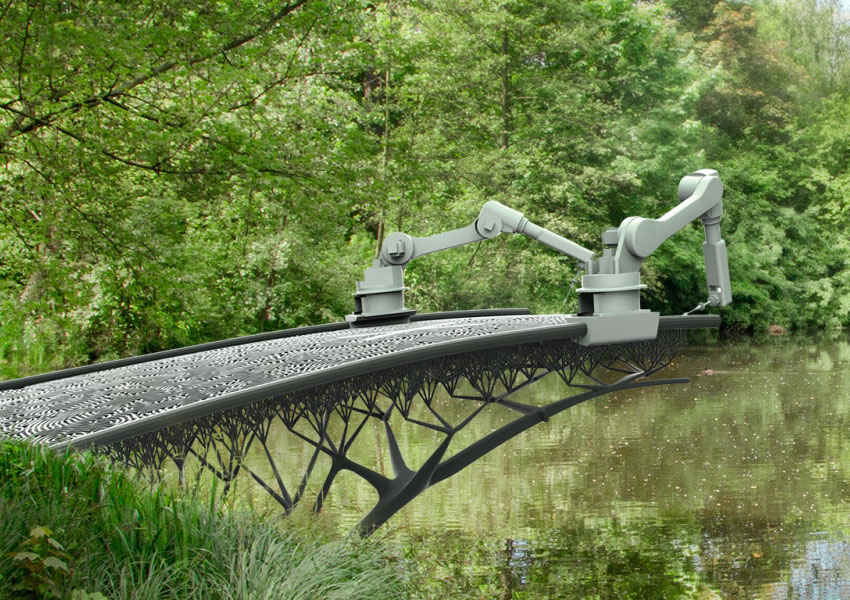
Seguir leyendo → - Puente impreso en 3D
Ámsterdam tendrá un puente impreso en 3D.
La pasarela de 12,4 mts de largo se hizo con 4 robots que usaron casi 4500 kilos de acero inoxidable.
Seguir leyendo →